|
DSP部分通过提供完整的HPI驱动程序(DSP部分)及通信协议,通过增加相应数据处理程控制算法程序,利用HPI并行接口与主机ARM通信进行数据交换,可用于各种实时处理,控制领域。
此外,DSP和ARM可以各自作为独立的系统使用,它们均有完整的子系统软件。子系统之间联系的核心是DSP器件本身带有的HPI接口。
2 ARM和DSP的通信接口设计
(1) DSP的HPI口介绍
HPI是TMS320C54X等芯片提供的一种并行端口,专门用于DSP和外部主机并行通信。HPI接口有标准HPI
接口和增强型HPI接口。对于C5416和C5420DSP器件,它们的主机接口为增强型主机接口。标准HPI接口是一个8位总线接口,通过2个8位字节组合在一起形成1个16位字节。增强型HPI接口分8位和16位两种。8位增强型主机接口和标准HPI接口操作时序一样,主要区别在于标准型只能访问2 KB专用RAM,而增强型可以访问DSP的整个RAM区。16位增强型HPI接口采用16位总线,只要一个主机操作就能完成访问操作。
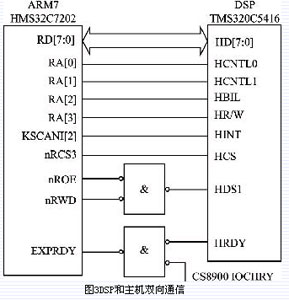
(2) HPI硬件连线
HMS30C7202与TMS320C5416接口电路如图3所示。系统将HPI接口所有控制寄存器、地址寄存器、数据寄存器统一编址,映射到HMS30C7202物理地址0X0C000000开始的I/O内存空间。
利用地址线RA\[3:0\]产生HPI访问所需的控制信号。A0与A1决定访问寄存器类型。A2决定访问的是第一个字节还是第二个字节:A2=0时,表示写入的数据为第一个字节;A2=1时,表示写入的数据为第二个字节。在HPI-8中所有地址线和控制线是在HDS1和HDS2的下降沿采样,而不是由HR/W决定,因此HR/W通过地址线A3表示当前操作是读还是写,而数据锁存信号由nRCS3和nRW0相与后共同产生。KSCAN[2]设置为HMS30C7202的PORTA中断输入脚,DSP通过中断方式与Linux底层HPI驱动程序通信。
3 ARM和DSP的通信接口驱动程序设计
Linux是Unix操作系统的一种变种。在Linux下编写驱动程序的原理和思想完全类似于其他的Unix系统,但它和DOS或Window环境下的驱动程序有很大的区别。Linux驱动程序可以编译进内核,也可以模块形式动态地加入和卸载。Linux的这种特点可根据目标系统裁减内核,更适合于嵌入式系统。
(1) Linux驱动程序基本原理
在Linux中所有设备分为字符设备、块设备和网络设备三种,所有设备都看成普通文件,因此可以通过用操纵普通文件相同的系统调用来打开、关闭、读取和写入设备。系统中每个设备都用一种设备特殊文件来表示。
在Linux中,设备驱动程序是一组相关函数的集合。它包含设备服务子程序和中断处理程序,每个设备服务子程序只处理一种设备或者紧密相关的设备。其目的就是从与设备无关的软件中接受抽象的命令并执行。当执行一条请求时,具体操作是根据控制器驱动程序提供的接口,并利用中断机制去调用中断服务子程序配合设备来完成这个请求。设备程序利用结构file_operations与文件系统联系起来。在Linux下驱动程序装载如图4所示。
|